
Power Hog


This is a picture of the original Action Man / G.I. Joe Power Hog, made by Hasbro.
I wanted to try and make this radio control with six wheel drive.

Two pictures of similar vehicles, one fully equipped and the other is a tracked, snow version using the same chassis components. These were manufactured and sold by Hasbro.


To convert my Hog firstly the chassis splits in two, the upper deck comes off leaving the lower tub with it's wheels attached.


Now remove the wheels as they are not suitable, make a new tub from metal and paint it green. Fit new axles made from brass tubing and solid brass rod.
The Gearbox is from a MB Electronics Bigtrak, note the bigtrak does have six wheels but only the middle pair are driven.
So I could not use this as the base vehicle instead I just reused the motor unit.


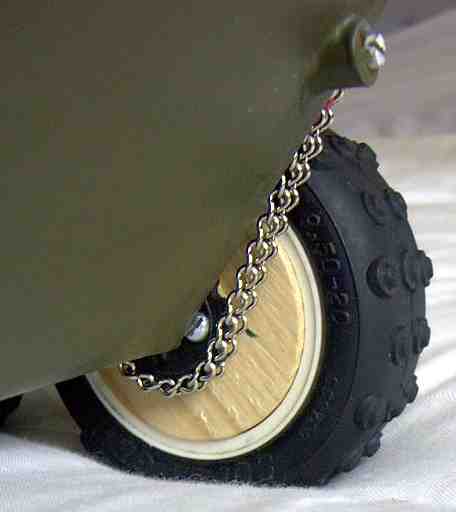
The wheels are some old Tamiya Hotshot front wheels, they have had wooden inserts fitted that allow a chain sprocket to be attached to the back of them. Each wheel is bushed using the same brass tubing at the axles.


A metal bearing is needed for the motor drive through the chassis, made from brass. Fit idler sprockets as shown in picture and then the chain, the front, red, sprocket can be adjusted to tension the chain.

Cut the upper deck as per picture and glue the seat in place and then trim it to fit around the gearbox.

Add 7.2v battery and radio gear, the battery is held in place by Velcro and some expanded foam.
It was fitted in the front to get an even weight distribution, an extension to the battery connector is used to get power to the dual motor speed controller mounted above the rear of the motor unit. (R/C equipment not shown)

Testing has shown that it's under powered, it has difficulty turning on soft surfaces, e.g. grass or a bed duvet.
To help improve it performance I have removed the Nicad pack (weighing 350g) and replaced it with a Li-Po pack (120g). The speed controller from a Tamiya 1/16 Sherman tank also seems to reduce the power to the motors more that I would expect, so I intend to replace it.

Chain tension is also critical in getting good running performance, too loose and it slips, too tight and the motors are heavily loaded.

Running current taken from the battery is only about 2A, so a low power speed controller design can be used. (Identical to my PT Boat's requirements, and 1/25 scale JagPanther.)
The Li-Po battery I am using is 7.4v 2000mAh 15C

The Power Hog is now finished, see pictures, a battery box has been added to the upper shell and a Li-Po compatible dual speed controller fitted (a Sabertooth ST2X5-RC) also the aerial has been routed away from the motors and on to a spring loaded aerial mount. To reduce interference even more capacitors have been soldered to the motor terminals.
With the Li-Po battery and better speed controllers the performance is now quite good and I am happy with this project.
I have the tracked version of this model as well (pictured at top of this page) but I don't intend to convert it yet, maybe when I get more time!
Oct 2009