
Electronics
Running the Kettenkrad using a standard tank style motor speed controller gives unrealistic driving.
In that you can do 360deg. turns on the spot and when running full speed forwards and turning, the inner track can slow down too much giving unrealistic turning. Also I am getting problems with thrown tracks when doing these types of manouvers, especially when the inner track has stopped moving in a turn.
To stop this I have designed and built a mixer unit that modifies the signals sent to the speed controller. It doesn't allow the inner track on a turn to slow down to the point where it stops (you set a track minimum speed that is maintained during turns) it also stops the 360deg. turning on the spot.
I am using a 4 channel radio control system to control the Kettenkrad, with
CH1 used for track turn left / right, front wheel steering and rider head movement
CH2 forward / reverse power
CH3 lights on/off
CH4 track turn
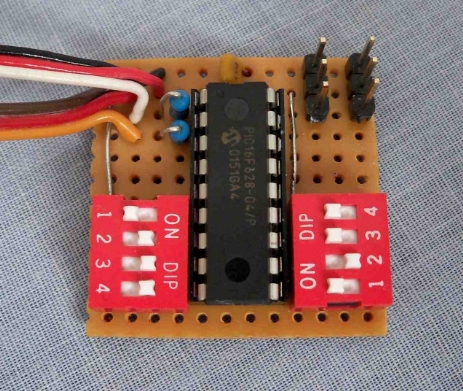
As you can see from the the picture it's a very simple circuit with a few components and all the work is done using the PIC 16F628. I chose this PIC because it has an inbuild oscillator and has enough I/O pins.
CH2 is the orange wire, CH4 white, the DIP switches set the minimum speed (left side smallest adjustment, right side bigger adjustments) with some solder links on the underside of the board.
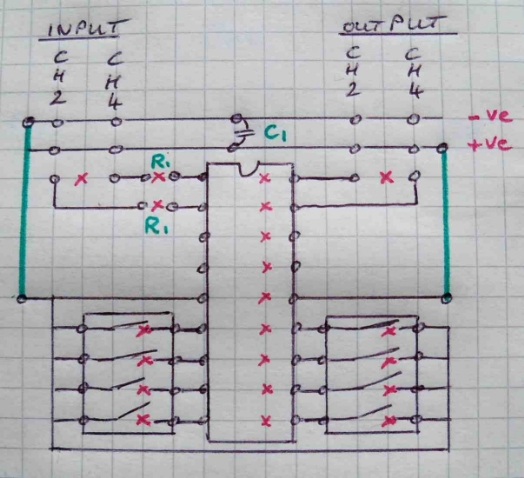
R1 = 10k resistor
on both input signals
C1 = 0.1uF capacitor
red cross = cut track
green line = wire link
I soldered my servo leads directly to the board rather than use pin headers as on the output pins, see picture above.
This is drawn as a top view, just like the picture above.